
Tricky tangles: Robots learn to navigate vine-like vegetation
In order to perform important tasks like environmental monitoring or search and rescue, robots must be able to navigate through branches and vines without getting tied up.
Robots are often found in very controlled, indoor environments because, unlike in a natural environment, there are no tripping hazards to overcome. However, in order to perform important tasks like environmental monitoring or search and rescue, robots must be able to navigate through branches and vines without getting tied up.
“When you take robots outdoors, the entire problem of interacting with the environment becomes exponentially more difficult because you have to be more deliberate in everything that you do,” said David Ologan, a master’s student studying mechanical engineering. “Your system has to be robust enough to handle any unforeseen circumstances or obstructions that you might encounter. It’s interesting to tackle that problem that hasn’t necessarily been solved yet.”
It’s interesting to tackle a problem that hasn’t necessarily been solved yet.
David Ologan, Master's student, Mechanical Engineering
The research team, led by Aaron Johnson, an associate professor of mechanical engineering, used a quadrupedal-robot to produce a reactive walking strategy. Alternatives like wheeled robots can become stuck in vines or cause damage to the environment.
“Real-world obstacles might be stiff like a rock or soft like a vine, and we want robots to have strategies that prevent tripping on either,” said Justin Yim, an engineering professor at the University of Illinois Urbana-Champaign and collaborator on the project.
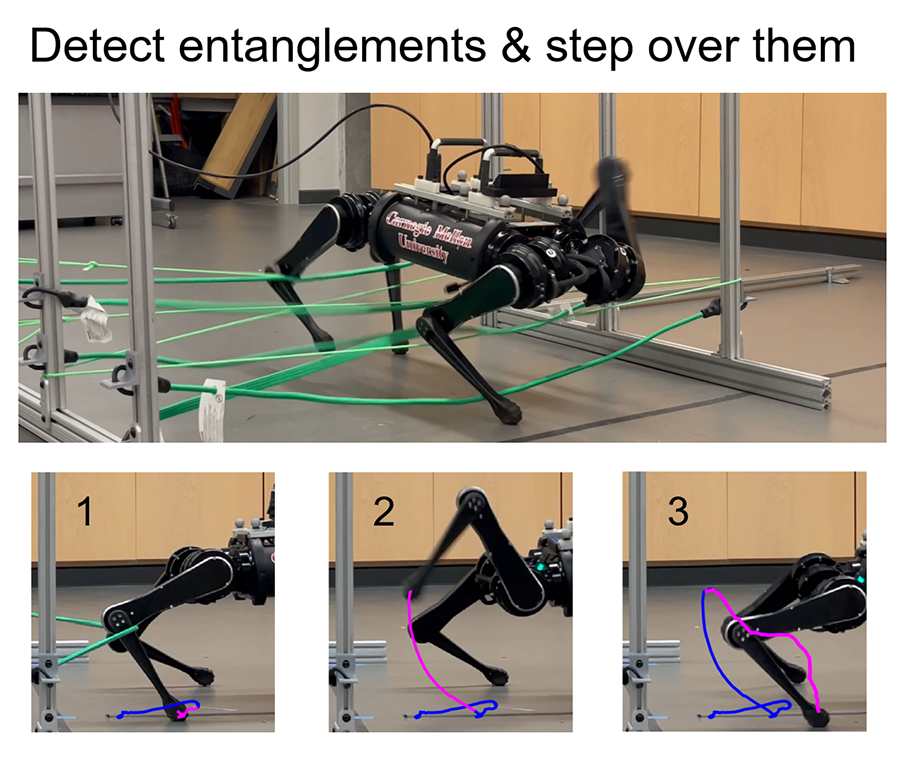
The research demonstrates a “momentum-based observer for proprioceptive joint torque estimation suited to classify contacts on a robot’s limb as entanglements.” That is, it monitors the motion of its legs to see if any are getting stuck on something and not making progress.
“Legged robots can select footholds and step over things as opposed to just driving over everything,” Ologan said. “The problem with this is with every step, you have to reason about your footholds. The system is incredibly delicate. If you bump into a step, your whole robot can fall over, so we need methods to respond to external contact.”
The environment also affects the efficiency and performance of robots, Ologan explains.
“The potential for legged robots in outdoor, vegetation-based environments is interesting to see,” he said. “If you live in a city, a wheeled platform is probably a better option because the infrastructure is already set up. There is a trade-off between being able to do more complex actions and being efficient with your movements.”
The ability for four-legged robots to walk through vegetation can be used in multiple fields and applications, Ologan said. Quadrupeds are now used to survey oil rigs, and improving their capabilities can also aid in rescue missions.
The team tested multiple iterations of Charlie’s–the robot’s–walking pattern. They found that having the robot reactively retract its legs was the best option in getting it to navigate and untangle itself from obstacles. Other methods, such as high-stepping and a knees-forward approach were not nearly as effective. Through this testing, the team was able to preset a simple leg reaction motion to disentangle from any detected entanglements. This technology to help robots untangle themselves can also be integrated into other robots without having to modify their existing hardware.
“This whole reaction strategy is just one part of a multi-step process,” Ologan said.
This research will be presented at the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023).